Welcome to the page of the workshop!
Workshop title
Distributed Cooperative Robotics: Numerical Methods and ROS 2 Software Tools
When
22 August 2022 within the 6th IEEE Conference on Control Technology and Applications
Organizers and speakers
Andrea Testa, Andrea Camisa and Giuseppe Notarstefano
Abstract
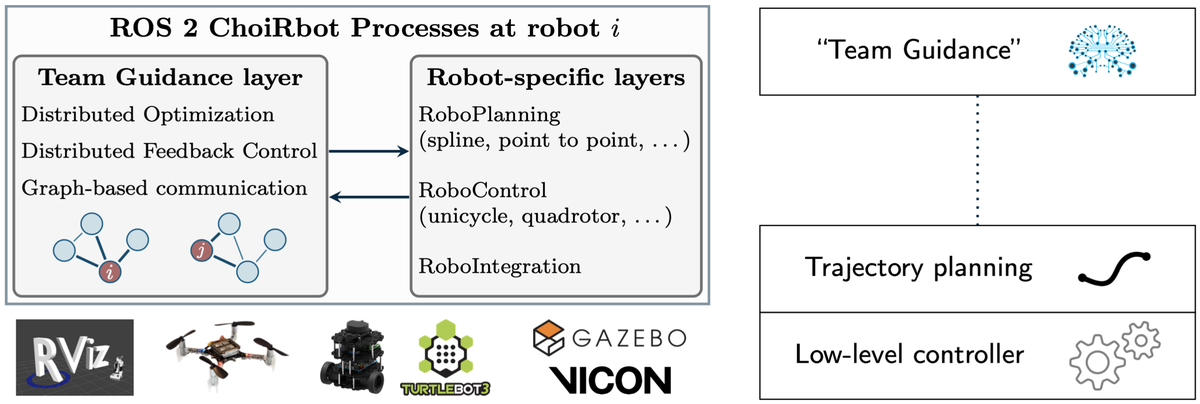
In the last years, several applications in cooperative robotics, such as task allocation, model predictive control, formation control, have gained more and more attention. On the one hand, the research community has developed a set of theoretical tools to solve these problems without a coordinating unit. In this setups, robots in the network, relying on their limited knowledge of the problem data, have to exploit local computation and communication capabilities to solve the complex task, which often requires also the solution of optimization problems. On the other hand, researchers and developers have developed several software toolboxes to implement control schemes on both simulated and real robots. The Robot Operating System (ROS), has gained popularity among robotics researchers as an open source framework for the development of robotics applications. In this workshop, we introduce a novel ROS 2 toolbox for cooperative robotics named ChoiRbot. This toolbox, written in Python, provides a comprehensive set of functionalities to easily prototype and code multi-robot simulations and experiments. The main focus of ChoiRbot is on peer-to-peer networks of robots, where each robot has its own processor and is able to communicate with the neighboring units according to a user-defined graph, possibly time-varying or with unreliable communication links. This workshop aims to provide an introductory foundation on distributed multi-robot networks, communication, optimization and control problems arising in this setting and state-of-art software tools to model and solve them. Exemplary applications include formation control for mobile wheeled robots and distributed task-assignment scenarios. The workshop will show how to use ChoiRbot to easily deploy simulations and experiments of multi-robot networks, with a particular focus on distributed optimization and control functionalities.
Where
Stazione Marittima, Trieste, Italy

This research was partially supported by the projects OPT4SMART n. 638992 funded by the European Research Council and “Distributed Optimization for Cooperative Machine Learning in Complex Networks” n. PGR10067 funded by Ministero degli Affari Esteri e della Cooperazione Internazionale.